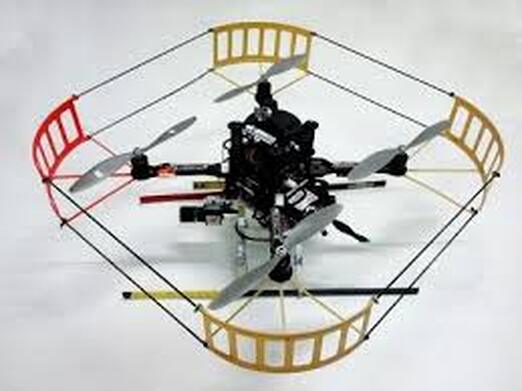
AscTec Pelican Quadrotor
A Brushless motor driven 750-gram quadcopter with 10-inch propellers. It has a Max. payload of 500 g. Equipped with an AscTec Autopilot sensor board V2 (including GPS receiver, 3 accelerometers, 3 gyroscopes, 3D magnetometer and height sensor), flight control software and software development kit, receiver, 3x 6250 mAh batteries, WiFi adapter, remote control, and propeller protection. It contains an AscTec Mastermind Core i7-3517UE (2x1.7GHz) 4GB DDR3 RAM, 17W TDP, 6x UART, 1x GPIO, 5x USB, 1x SATA, 1x Micro-SD, 1x CF, 1x VGA, 3x Firewire, 1x Ethernet, 1x mini-PCIe.
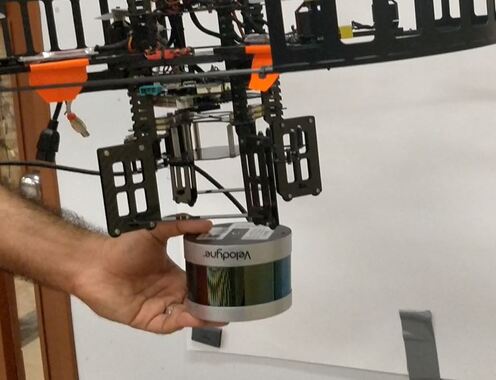
Installation and testing of open-source ROS driver for control of aerial platform, platform status feedback, and image display. Active camera mount, camera is to be mounted below the system. Camera's tilt angle is remotely switchable and Includes feet extensions. 105 g mass. Also, a hardware mount for LiDAR
Installation and testing of open-source ROS driver for control of aerial platform, platform status feedback, and image display. Active camera mount, camera is to be mounted below the system. Camera's tilt angle is remotely switchable and Includes feet extensions. 105 g mass. Also, a hardware mount for LiDAR

|
|
|
Hexacopters

|

|